Swarm Mapping
Experiments with occupancy grid-based multi-robot simultaneous localisation and mapping (SLAM) for simple low-cost mobile robot platforms utilising low-bandwidth short-range communications and range-only sensors.
This article concerns my final year project for my honours degree at the University of Surrey. The project explores the concept of using a swarm of simple robots to map an environment.
Abstract
Mapping environments is an important issue in the field of robotics. Most mobile robots require a map of the environment they are operating in. Whilst some are preprogrammed with this map, many will find it desirable to construct their own map on the fly.
Multi-robot systems have the potential to perform this task more quickly and accurately than single robot systems.This project will explore the concept of using a swarm of homogeneous robots to explore a 2 dimensional environment.
First, this project will explore existing SLAM and multi-robot SLAM applications and solutions within the literature. Next we will design and implement a simulator to test various algorithms.
In this project, eight algorithms are designed and tested on the simulator. The maps produced by each of the algorithms are presented, and their performance is discussed and evaluated. The simulator allows us to run multiple batches of experiments automatically and the results are visualised and compared.
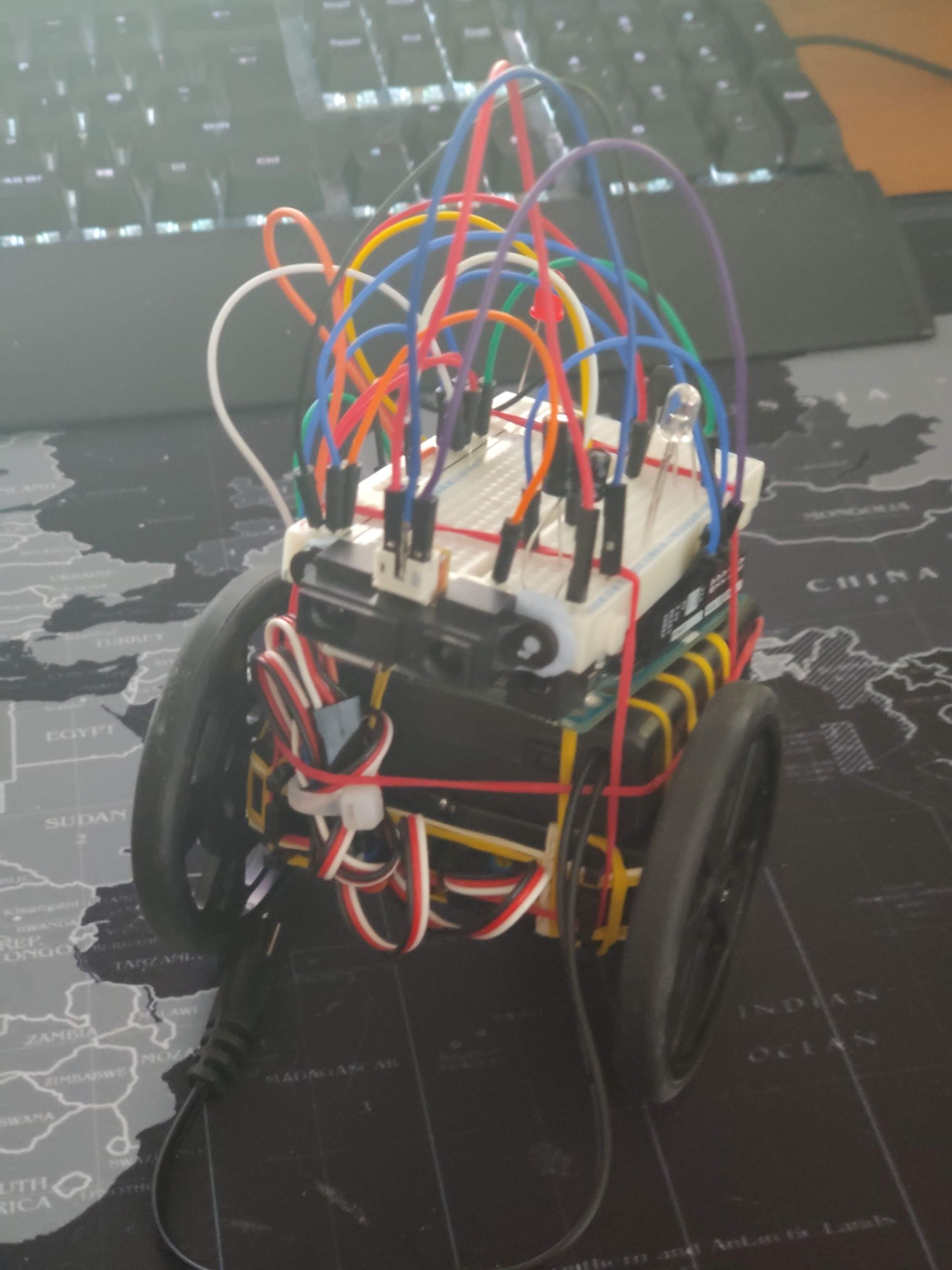
We also design and present a swarm of simple robots capable of carrying out the swarm mapping task. This platform uses the Arduino development board and is inexpensive and easy to construct.
Full Dissertation PDF: https://portfolio.jbm.fyi/static/swarms.pdf
Resources Download: https://portfolio.jbm.fyi/static/swarms.zip